Особенности
Одноосный роботизированный модуль HIWIN использует технологию производства профессионального стандарта, разработанную на протяжении многих лет, с модулем проектирования шариковых винтов и магнитных ползунов, разработанным и изготовленным компанией HIWIN применим ко всем типам оборудования автоматизации благодаря своим особенностям легкой установки, небольшого размера, высокой точности и различным техническим характеристикам.
Классификация
Номинал.
ширина |
KK
Высокая
точность |
SK
Тип
синхронного
движения |
KC
Легкий |
KA
Легкий |
KS
Усоверш.
пылезащ. |
KU
Пылезащ.
с высокой
жесткостью |
KE
Базовая
пылезащ. |
| 30 |
● |
|
● |
|
|
|
● |
| 40 |
● |
|
● |
|
|
|
● |
| 50 |
● |
|
● |
|
|
|
● |
| 60 |
● |
● |
● |
|
|
● |
|
| 65 |
|
|
|
|
|
|
● |
| 70 |
|
|
|
|
|
|
● |
| 80 |
● |
|
|
|
|
● |
|
| 86 |
● |
● |
|
|
|
|
|
| 90 |
|
|
|
● |
● |
|
● |
| 100 |
● |
|
|
● |
● |
|
|
| 120 |
|
|
|
● |
● |
|
|
| 130 |
● |
|
|
|
|
|
|
| 136 |
|
|
|
● |
|
|
|
| 140 |
|
|
|
|
● |
|
|
| 150 |
|
|
|
● |
● |
|
|
| 170 |
|
|
|
● |
|
|
|
| 180 |
|
|
|
|
● |
|
|
| 200 |
|
|
|
● |
|
|
|
Примечание: KA 100/136/170 и KS 100/140/180 также могут приводиться с ременным приводом для применений, требующих высокой скорости и большого хода.
Процесс выбора
При выборе одноосного робота на основе различных условий и ограничений вы можете обратиться к следующему процессу выбора:
|
1. Требования пользователя:
● Эффективный ход и ограничения по местоположению
(ширина, высота, длина)
● Установка (горизонтальное, вертикальное, боковое крепление)
и положение силы тяжести, центр нагрузки
● Условия эксплуатации (опережение, скорость, ускорение
и замедление, рабочий цикл)
● Окружающая среда (высокая температура, вибрация, масло,
вода, коррозия)
|
5. Расчет нагрузки на двигатель
● Максимальная скорость
● Разрешение двигателя
● Расчет крутящего момента двигателя
|
|
2. Потребность в точности
● Точность позиционирования
● Повторяемость
● Параллелизм выполнения
|
6. Анализ операций
● Ускорение
● Фактический режим работы (V-T диаграмма)
|
|
3. Конфигурация
● Одиночная ось
● Двойная ось
● Многоосевой
● Специальная комбинация
|
7. Другие аксессуары
● Использование сопутствующих аксессуаров
(концевые выключатели, переходная пластина,
выдвижная оболочка, защитная трубка
с контактным кольцом)
|
|
4. Выбор двигателя
● Серводвигатель переменного тока
● Шаговый двигатель
● С тормозом или без него (входит в комплект,
подключаемый модуль)
|
8. Окончательное подтверждение
● Условия использования должны
быть подтверждены
● Цена, крайний срок
● Изменение
● Особые требования
|
Для предварительного выбора вы можете обратиться
к следующим характеристикам одноосного робота:
| Хар-ки |
КК, SK |
KC |
KA |
KS |
KU |
KE |
| Точность |
Отлично
(повторяемость, позиционирование,
параллелизм) |
Нормально
(повторяемость) |
| Нагрузка |
Большая |
Маленькая |
Средняя |
Маленькая |
| Вес |
Тяжелый |
Легкий |
Настраеваемый
(ход, платформа) |
Да |
| Жесткость |
Хорошо
(стальная конструкция) |
Обычно
(Алюминиевое основание
в сочетании со
стальной конструкцией) |
Нормально
(основа из алюминиевого сплава) |
Низко
(основание направляющей) |
| Покрытие |
Алюминий |
Нержавеющая сталь |
Алюминий |
Нержавеющая сталь |
Чистота
линии |
Нормально |
Хорошо |
Нормально |
Отлично
(с вакуумом) |
Хорошо |
Нормально |
| Пылезащита |
Нормально |
Хорошо
(полностью покрыто) |
Нормально |
Хорошо
(полностью покрыто) |
Компонент
привода |
Шариковый винт
(большая нагрузка,
хорошая точность) |
Шариковый
винт (хорошая точность) |
Шариковый винт,
ремень (длинный ход,
высокаяскорость) |
Шариковый винт
(большая нагрузка,
хорошая точность) |
Шариковый винт
(хорошая точность) |
Соединение
между двигателем
и шариковым винтом |
Прямой, с боковым
ремнем |
Прямой |
Внутреннее
расположение двигателя |
Нет |
Да |
Нет |
| Bellow |
Да (стандарт) |
Нет |
Да (по
индивидуальному заказу) |
Нет |
| Монтаж |
Сверху |
Сверху и снизу |
Снизу или сверху |
Снизу |
Любое положение
(снизу, сбоку) |
Снизу |
Скачать файлы по линейным модулям HIWIN
Точность
Точность позиционирования
Максимальная разница (абсолютное значение) между фактическим расстоянием прибытия и расстоянием достижения на основе исходной настройки.
Повторяемость положения в оба конца (точность)
Максимальная разница за весь цикл. Разница в значении позиционирования, измеренном от установочного положения во время кругового перемещения ползуна одноосного робота.
Идущий параллелизм
(1) Параллельность между плоскостью платформы одноосного модуля робота и плоскостью установки модуля. Расположите масштабируйте в центре ползунка, а затем поместите указатель на плоскость установки. Наконец, в качестве результата возьмите максимальное значение отклонения, измеренное при полном ходе.
(2) Параллелизм между одноосной платформой модуля робота и базовой точкой установки. Расположите шкалу в центре ползунка и наведите указатель на установочную точку. Наконец, в качестве результата возьмите максимальное значение отклонения, измеренное при полном ходе.
Скорость
Максимальная линейная скорость
Максимальная линейная скорость одноосного робота (V) рассчитывается исходя из скорости (S) шарикового винта, умноженной на ход (L).
V(мм/сек)=S(об/мин)÷60×L(мм)
Максимальная скорость вращения
Максимально допустимая скорость вращения шарикового винта определяется его критической скоростью вращения. Если скорость шарикового винта превышает его критическую скорость, это может привести к резонансу. Следовательно, критическая скорость связана с длиной шарикового винта, критическая скорость может помочь определить эффективный ход и общую длину шариковых винтов.
Максимально допустимая скорость вращения шарикового винта рассчитывается следующим образом:

Np = максимально допустимая скорость вращения (об/мин)
Mf = разбивка типа крепления сборки; KA использует тип фиксированной опоры; Mf = 0.689
dr = диаметр корня винта (мм)
Lt = расстояние между винтами между подшипниками (мм)
Ускорение/Замедление
Скорость задается как рабочая скорость раздвижного стола. Скользящий стол должен разгоняться до заданной скорости при движении в заданное положение, напротив, он должен замедлиться, прежде чем остановиться.
Ускорение/замедление программируется оператором в соответствии с необходимыми условиями. Ускорение в системе aKA установлено на уровне 0.15 G, рассчитанное для отведения = 5, 0.3 G рассчитывается для всех остальных отведений. 1G = 9,8 м/с2, следовательно
0.15G = 1470 мм/с2, 0.3G = 2940 мм/с2, максимальная нагрузка, указанная в каталоге, основана на этом ускорении/замедление.
Внимание: ускорение/замедление создет силу инерции на грузе. При более высоком ускорении/замедлении нагрузка соответственно увеличится. Кроме того, более высокое ускорение/замедление может привести к возможному воздействию, и это следует отметить.
Рабочий цикл
Рабочий цикл системы SR определяется оператором. Приведенная ниже диаграмма иллюстрирует, как обычно рассчитывается рабочий цикл. Переменные включают время ускорения Ta, время постоянной скорости Tc, время замедления Td и время холостого хода Tf.
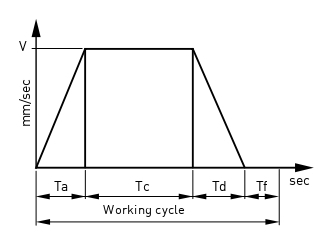  |
- Ускоряющаяся скорость = V/Ta
- Скорость замедления = V/Td
- Рабочий цикл (сек) = Ta + Tc + Td + Tf
- Рабочее время = рабочий цикл × частоту
- Коэффициент работы = рабочее время / (рабочее время + нерабочее время)
- Рабочий коэффициент тесно связан с нагрузкой двигателя.
Обычно рабочее соотношение не рекомендуется превышать 0.5 при длительной непрерывной работе.
|
Расчет нагрузки на двигатель
Подтвердите условия перемещения, требуемые механизмом загрузки, включая ускорение, замедление, вес механизма и его перемещение.
Расчет импульсной нагрузки:
Расчет импульса для грузов, движущихся по прямой линии
^2{} = W\times\left ( \frac{\Delta S}{20\times \pi } \right )^2{}")
Выберите подходящую спецификацию двигателя с пропорциональным принципом в соответствии с моментами между нагрузкой и двигателем.
Рассчитайте моменты ускорения и замедления в зависимости от импульса выбранного двигателя в сочетании с импульсом нагрузки.
Момент ускорения: \times N}{9.55\times 10^4{}\times T_p_s{}_a{}}")
Момент торможения: \times N}{9.55\times 10^4{}\times T_p_s{}_d{}}") |
JL : Момент нагрузки, рассчитанный на осевую мощность двигателей (кг/см2)
JM : Импульс двигателя (кг/см2)
N : Скорость вращения двигателя (об/мин)
Tpsa : Время (s) ускорения/замедления
Tpsd : Время (s) |
В соответствии с нагрузками, методами установки, коэффициентами трения и эффективностью двигателя рассчитайте крутящий момент при равномерном движении.

F : Осевая сила, движущаяся по прямой линии: F = Fс + μx (Wxg + Fо)
TL : Крутящий момент нагрузки (N.m)
Fс : Внешняя сила, действующая в осевом направлении (N)
Fо : Внешнее положительное давление, оказываемое грузом на одноосного робота (N)
W : Нагрузка (включая раздвижную платформу, кг)
μ : Коэффициент трения
η : Механическая эффективность
V : Скорость груза по прямой линии (мм/мин)
N : Скорость вращения двигателя (об/мин)
g : Гравитация (9.8м/с2)
ΔS : Смещение нагрузки на один оборот двигателя (мм)
Максимальный выходной крутящий момент выбранного двигателя должен быть больше суммы момента ускорения и момента нагрузки; если это условие не выполняется, необходимо изменить номер модели и рассчитать его до тех пор, пока не будет выполнено требование.
Получите непрерывный эффективный крутящий момент в зависимости от крутящего момента нагрузки, момента ускорения, момента замедления и непрерывного крутящего момента.

| Tpsa : Время ускорения |
TLH : Непрерывный крутящий момент (горизонтальное перемещение, TLH=0) |
| Tpsd : Время замедления |
th : Время остановки |
| Tf : Время цикла |
Ta : Момент ускорения |
| TL : Крутящий момент нагрузки |
Td : Момент торможения |
| TLH : Непрерывный крутящий момент (горизонтальное перемещение, TLH=0) |
Номинальный выходной крутящий момент выбранного двигателя должен превышать постоянный эффективный крутящий момент; если это условие не выполняется, необходимо изменить номер модели и рассчитать его до тех пор, пока требование не будет выполнено.
Натяжение ремня бокового крепления двигателя и модуля ременной передачи
Крепление на стороне двигателя и модуль ременной передачи.
Чтобы избежать повреждения шарикового винта или проскальзывания ремня, вызванного неправильным натяжением ремня, ознакомьтесь с таблицами 1 и 2 перед установкой ремня.
| Модель |
Спецификации пояса |
Макс. Натяжение (Н) |
| KA100-FL (R、D) |
FR-3GT-90W-309L
FL-3GT-90W-216L
FD-3GT-90W-237L |
44 |
| KA136-FL (R、D) |
FL (R)-5GT-90W-350L
FD-5GT-90W-300L |
55 |
| KA170-FL (R、D) |
FL (R)-5GT-150W-420L
FD-5GT-150W-320L |
96 |
| KA200-FL (R、D) |
FL (R)-5GT-150W-460L
FD-5GT-150W-360L |
| KS100-FL (R) |
FL (R)-3GT-60W-234L |
44 |
| KS140-FL (R) |
FL( R)-5GT-90W-350L |
55 |
| KS180-FL (R) |
FL (R)-5GT-90W-400L |
| KC40-FL (R) |
2GT-60W-160L |
15 |
| KC50-FL (R) |
3GT-60W-180L |
29 |
| KC60-FL (R) |
3GT-60W-186L |
Таблица 1 Натяжение ремня бокового крепления двигателя
| Модель |
Спецификации пояса |
Макс. Натяжение (Н) |
| KA-100B |
HTD 3M-15W |
74 |
| KA-136B |
HTD 5M-25W |
178 |
| KA-170B |
HTD 5M-25W |
| KS-100B |
HTD 3M-15W |
74 |
| KS-140B |
HTD 5M-25W |
178 |
| KS-180B |
HTD 5M-25W |
Таблица 2 Натяжение ремня модуля ременной передачи
Срок службы
При горизонтальной, боковой или наклонной ориентации (менее 30 градусов) срок службы зависит от направляющей, а при вертикальной ориентации срок службы зависит от шарикового винта или неподвижного подшипника, в зависимости от того, какой из них короче.
Указанная динамическая нагрузка (Fy, Fz, Mx, My, Mz) основана на сроке службы 10.000 км пробега. Если нагрузка меньше, чем условие загрузки (Fy/Fy + Fz/Fz + Mx/Mx + My/My + Mz/Mz )≈1), срок службы может быть увеличен. Если нагрузка будет превышена, то срок службы составит менее 10.000 км. Для обеспечения длительного использования рекомендуется, чтобы загрузка должна находиться в пределах указанного диапазона
Поддержка
Все сопутствующие аксессуары, шариковый винт и направляющая нуждаются в обслуживании. Через каждые 3 месяца или 100 км рекомендуется добавлять смазку в шариковый винт и направляющую. Очистите систему от пыли и мусора . Замените смазку, если есть какие-либо изменения цвета.


 Полный каталог продукции Линейных модулей HIWIN (EN)
Полный каталог продукции Линейных модулей HIWIN (EN)